diff --git a/docs/source/en/_toctree.yml b/docs/source/en/_toctree.yml
index 264824fc87..35df6191d5 100644
--- a/docs/source/en/_toctree.yml
+++ b/docs/source/en/_toctree.yml
@@ -81,6 +81,8 @@
title: Video classification
- local: tasks/object_detection
title: Object detection
+ - local: tasks/zero_shot_object_detection
+ title: Zero-shot object detection
title: Computer Vision
- sections:
- local: tasks/image_captioning
diff --git a/docs/source/en/tasks/zero_shot_object_detection.mdx b/docs/source/en/tasks/zero_shot_object_detection.mdx
new file mode 100644
index 0000000000..4ba77647e6
--- /dev/null
+++ b/docs/source/en/tasks/zero_shot_object_detection.mdx
@@ -0,0 +1,305 @@
+
+
+# Zero-shot object detection
+
+[[open-in-colab]]
+
+Traditionally, models used for [object detection](object_detection) require labeled image datasets for training,
+and are limited to detecting the set of classes from the training data.
+
+Zero-shot object detection is supported by the [OWL-ViT](../model_doc/owlvit) model which uses a different approach. OWL-ViT
+is an open-vocabulary object detector. It means that it can detect objects in images based on free-text queries without
+the need to fine-tune the model on labeled datasets.
+
+OWL-ViT leverages multi-modal representations to perform open-vocabulary detection. It combines [CLIP](../model_doc/clip) with
+lightweight object classification and localization heads. Open-vocabulary detection is achieved by embedding free-text queries with the text encoder of CLIP and using them as input to the object classification and localization heads.
+associate images and their corresponding textual descriptions, and ViT processes image patches as inputs. The authors
+of OWL-ViT first trained CLIP from scratch and then fine-tuned OWL-ViT end to end on standard object detection datasets using
+a bipartite matching loss.
+
+With this approach, the model can detect objects based on textual descriptions without prior training on labeled datasets.
+
+In this guide, you will learn how to use OWL-ViT:
+- to detect objects based on text prompts
+- for batch object detection
+- for image-guided object detection
+
+Before you begin, make sure you have all the necessary libraries installed:
+
+```bash
+pip install -q transformers
+```
+
+## Zero-shot object detection pipeline
+
+The simplest way to try out inference with OWL-ViT is to use it in a [`pipeline`]. Instantiate a pipeline
+for zero-shot object detection from a [checkpoint on the Hugging Face Hub](https://huggingface.co/models?other=owlvit):
+
+```python
+>>> from transformers import pipeline
+
+>>> checkpoint = "google/owlvit-base-patch32"
+>>> detector = pipeline(model=checkpoint, task="zero-shot-object-detection")
+```
+
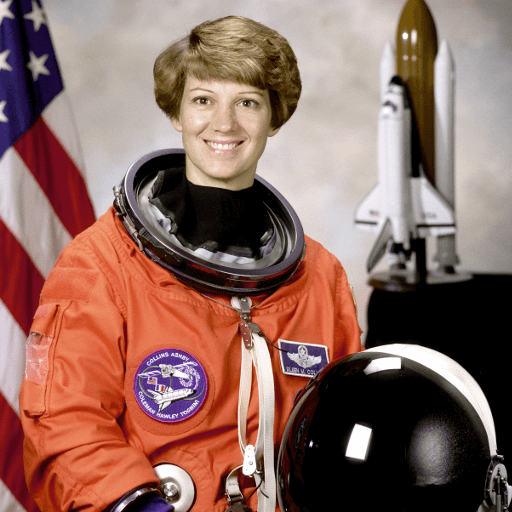
+Next, choose an image you'd like to detect objects in. Here we'll use the image of astronaut Eileen Collins that is
+a part of the [NASA](https://www.nasa.gov/multimedia/imagegallery/index.html) Great Images dataset.
+
+```py
+>>> import skimage
+>>> import numpy as np
+>>> from PIL import Image
+
+>>> image = skimage.data.astronaut()
+>>> image = Image.fromarray(np.uint8(image)).convert("RGB")
+
+>>> image
+```
+
+
+
+
+
+
+

+
+

+
+
+
+
+
+

+